My Experiences
My Current Positions
Robotics student with a demonstrated history of working in fast-paced, multidisciplinary team environments. Skilled in engineering, automation, robotics, scientific research, and leadership.
Graduate Researcher @ Bio-Inspired Robotics Technology & Healthcare Lab
August 2023 – Present
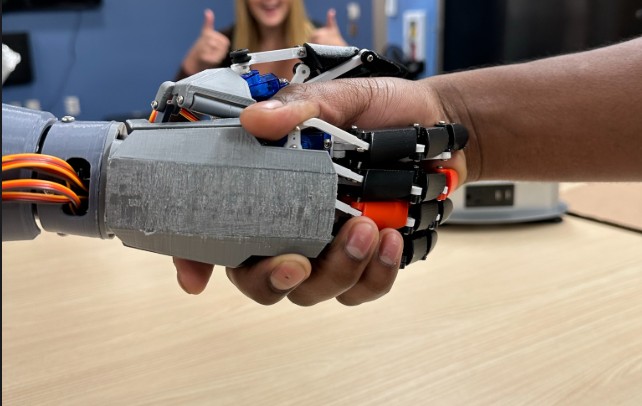
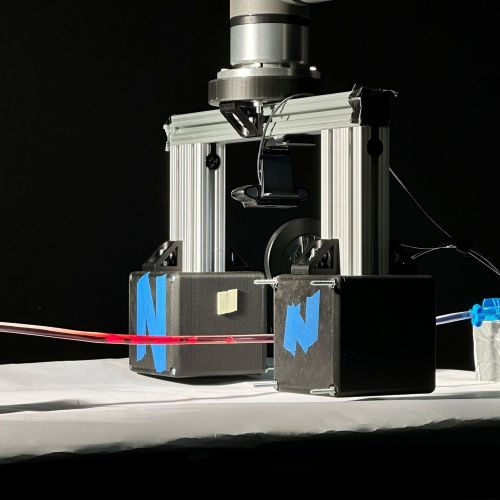
As a Graduate Researcher at the BIRTH (Bio-Inspired Robotics, Technology & Healthcare) Lab at Arizona State University, I worked on translational medical robotics projects in collaboration with clinical partners. I co-developed a patent-pending magnetic thrombectomy device aimed at non-invasive stroke intervention, and contributed to the design of a robotic endoscopy and neurosurgery platform for minimally invasive neurosurgery. In addition to these flagship projects, I built experimental testbeds for simulating surgical tasks. My responsibilities included CAD modeling, rapid prototyping, sensor integration, and drafting technical documentation for clinical validation and publication.
Controls Engineering Intern @ ClearFlame Technologies
January 2024 – August 2024
As a Controls Engineering Intern at ClearFlame Technologies, I worked on advanced engine control systems for ethanol-based combustion engines. I developed an On-Board Diagnostics (OBD) system using OpenECU and Simulink, ensuring compliance with SAE J1939 standards for vehicle communication and diagnostics. To support scalable development, I designed modular Simulink libraries for real-time monitoring of digital, analog, and CAN signals. Additionally, I built a comprehensive test harness to validate system reliability and performance under dynamic operating conditions, contributing to the overall robustness of ClearFlame’s engine control platform.

Engineering Intern @ ThorDrive AI
May 2022 – April 2023
As a Mechatronics Intern at ThorDrive Inc., I contributed to their autonomous Ground Support Equipment (GSE) program at CVG Airport. I engineered a custom J1939 protocol layer to transmit over 60 sensor data messages between the MCU and VCU via the vehicle CANBUS. I also conducted market research to identify and integrate improved sensors and actuators, enhancing the vehicle's overall design. To support data-driven development, I automated the analysis and visualization of large datasets (4.5M+ lines) from the vehicle’s CANBUS, IMU, and GNSS sensors using MATLAB and ROS. Additionally, I performed Fourier transform analysis on vibration data to assist in the design of a vibration isolation system. My responsibilities also included authoring detailed technical documentation and performance reports on sensor integration and system evaluation.
Product Video

Graduate Teaching Assistant @ ASU – FSE 100
August 2024 – May 2025
I currently serve as a Graduate Teaching Assistant for FSE 100, ASU's introductory engineering course with over 500 students per semester. In this role, I lead lab sessions, facilitate group design projects, and provide technical mentorship in engineering fundamentals, project planning, and prototyping. I assist in grading technical reports and presentations, manage classroom logistics, and offer one-on-one academic support to help students transition into the engineering curriculum. Prior to this, I served as both an Undergraduate Teaching Assistant (UGTA) and Undergraduate Instructional Assistant (UGIA) across multiple semesters, supporting over 800 students cumulatively. My experience reflects a strong commitment to engineering education and student development.

Leadership & Mentorship Roles
2021 – 2023 || Arizona State University
Led 90+ peers as Co-President of Fulton Ambassadors, representing ASU’s engineering school to donors, industry, and prospective students. Organized outreach and professional development programs. As a GCSP Student Leader, supported 300+ interdisciplinary students through community-building and networking events. Mentored high school teams in EPICS High on real-world engineering projects. Also contributed to soft robotics research at the RISE Lab and supported hybrid classrooms through the University Technology Office.
• Fulton Ambassadors – Co-President, led 90+ members, external engagement
• GCSP – Student Leader, events and community support for 300+ students
• EPICS High – Mentor, guided student teams on engineering solutions
• RISE Lab – Research Assistant, soft robotics prototyping

STEM Education Instructor & Camp Lead
2021 – 2023 || Arizona State University
Served in multi-year instructional roles for ASU’s premier outreach and education programs, including SEE@ASU, NSTI, LEGO Camp, Barrett Summer Scholars, and GEARUP. Delivered engaging, week-long modules on biomimicry, robotics, and design thinking. Led teams, managed logistics, and supported over 200 students across K–12 pipelines. Also supported FSE 100, EGR 101, and FSE 150 courses as an Undergraduate Teaching Assistant, facilitating labs, review sessions, and hands-on instruction in Arduino, sensors, and SolidWorks.